 ▶ Open Video
▶ Open VideoEmbodied Robot Navigation
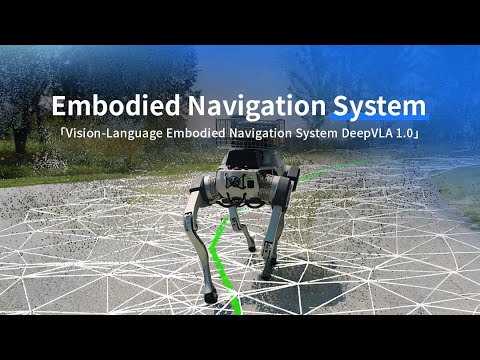
See a modern robot navigation system handling complex environments and dynamic obstacle avoidance.
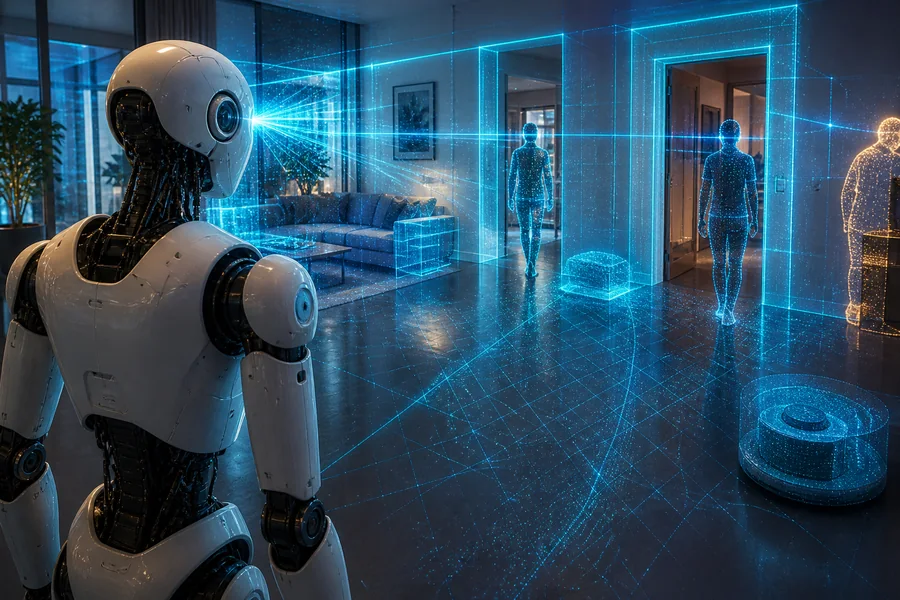
Imagine a robot entering a busy room, noticing where people are moving, remembering what worked before, and choosing a smarter path instead of blindly testing every possible move. That is the practical idea behind this navigation breakthrough.

Why you should care: Better robot navigation is not just about getting from point A to point B. It is about making machines more reliable around people, obstacles, traffic, tight spaces, and changing real-world conditions.
Robots are good at repeating a fixed routine, but navigation gets harder when the space changes. A hallway, crowd, warehouse, intersection, doorway, or roundabout can all force a robot to make decisions fast. The smarter approach is to let the robot explore when it needs to, observe what is happening around it, and use past experience when the situation looks familiar.
This kind of model pushes robotics away from stiff demos and toward practical machines that can adapt. Instead of treating every scene like the first scene it has ever seen, the robot can use learned patterns to guide its next move.
You do not map every possible step when you walk through a crowd. You look ahead, recognize openings, avoid people, and make quick judgment calls based on memory and experience. A robot needs the same basic advantage: a way to combine planning with learned behavior.
The important part is the balance. If the robot is confident because the scene resembles something it has learned before, it can move more directly. If the model is unsure, it can still fall back to exploration and safer planning.
Navigation is one of the places where robots either become useful or fall apart. A robot that constantly freezes, bumps into obstacles, or takes strange paths is not ready for homes, hospitals, warehouses, sidewalks, or autonomous driving. A robot that learns from past experience becomes easier to trust.
That matters for autonomous vehicles, delivery robots, warehouse robots, service robots, and future humanoids. The same core idea applies everywhere: better movement, better perception, better decisions, and better reliability.

The long-term value is simple. Each improvement turns isolated lab demonstrations into systems that can handle more of the messy real world. Robots need to move through spaces that were built for people, not perfect test tracks. Smarter navigation is one of the big steps toward that future.
This is also where robotics becomes more human-friendly. The robot does not need to think like a person in every way. It just needs enough learned experience to make better choices when the environment gets complicated.

These videos now match the article: real-world robot navigation, terrain understanding, dynamic obstacle handling, and multi-agent collision avoidance. Click any card to open the pop-out player.
▶ Open VideoSee a modern robot navigation system handling complex environments and dynamic obstacle avoidance.
 ▶ Open Video
▶ Open VideoSpot demonstrates why smarter perception and terrain understanding are critical for robots operating outside perfect lab conditions.
 ▶ Open Video
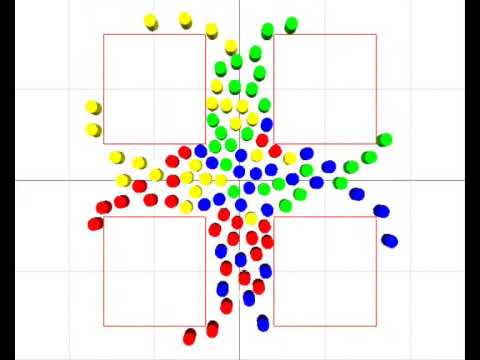
▶ Open VideoWatch how autonomous agents predict movement and avoid collisions when several moving paths overlap.